Манипулятор грузоподъемность: Как правильно подобрать кран манипулятор для транспортировки
Кран-манипулятор: технические характеристики | Статьи ТОП-Трейд
В число наиболее распространенных видов техники специального назначения входит кран-манипулятор. Существующие модели отличаются по видам, типам, устройству, техническим характеристикам.
Содержание:
Кран-манипулятор как один из видов спецтехники
Как работает кран-манипулятор
✎ Функциональное применение манипулятора
✎ Сменное оборудование
Технические характеристики крана-манипулятора
✎ Величина грузового момента и грузоподъемности
✎ Виды стрелового оборудования
✎ Орган управления
✎ Выдвижные опоры
✎ Виды шасси
Обеспечение безопасности установки
Основные производители
Кран-манипулятор как один из видов спецтехники
В широком смысле понятия в состав единицы спецтехники, именуемой крановой или манипуляторной установкой, входит собственно кран-манипулятор и шасси на основе грузовой машины.
- раму опорную;
- систему органов управления;
- датчики и другие элементы безопасности;
- крановую стрелу;
- грузозахватное приспособление.
Как работает кран-манипулятор
Установка совмещает два вида техники – классическую крановую установку и грузовик, способный перевозить определенный объем грузов. Размещается манипулятор на автомобильном, тракторном или прицепном шасси. Функциональная насадка, выполняющая определенный вид работы, может меняться, но общая конструкция остается прежней. Например, вместо крана может использоваться люлька для поднимания людей, а в некоторых случаях и устройство для забивания свай.
✎ Функциональное применение манипулятора
Установка способна перевозить грузы и осуществлять все виды погрузочных и разгрузочных работ в соответствии с грузоподъемными возможностями крана и шасси, а также размером кузова конкретной единицы техники.
Используется в строительстве, логистике, жилищно-коммунальной сфере, при осуществлении аварийных работ. В зависимости от сменных рабочих насадок может выполнять самые разные задачи, включая перегрузку леса или металлолома, подъем люльки, забивание свай.
✎ Сменное оборудование
Кран-манипулятор относится к универсальному типу оборудования. В перечень сменного оборудования входит достаточно много устройств различного типа, включая:
- различные виды захватов;
- классический крановый зацеп;
- вилочные захваты поддонов;
- люлька для поднятия людей;
- грейферные устройства;
- приспособления для забивания свай.
Технические характеристики крана-манипулятора
В перечень основных характеристик крана-манипулятора входят:
- предельные расстояния по высоте поднятия груза и его опускания;
- предельно допустимый радиус поворота крана;
- расстояние предельного и минимального вылета манипуляторной стрелы;
- грузоподъемность при различных значениях выдвижения стрелы;
- величина грузового момента;
- вид подвески;
- особенности выдвижения телескопической конструкции стрелы;
- количество граней на выдвижных элементах.


Решающие значения для манипуляторной установки имеют грузоподъемность шасси, вылет стрелы и показатель грузового момента. В той или иной степени значение имеют все характеристики спецтехники. Например, если не учитывать размеры погрузочной площадки, то это существенным образом может повлиять на способность выполнить поставленную задачу.
Опытному пользователю КМУ достаточно ознакомиться с диаграммой грузовысотной характеристики. По этой схеме легко определить эффективность манипулятора при выполнении той иной задачи.
✎ Величина грузового момента и грузоподъемности
В зависимости от грузоподъемности установки делят на соответствующие категории. Деление достаточно условно, но за основу можно взять следующую классификацию:
- грузоподъемность до 1 тонны;
- от 1 до 10 т или средней грузоподъемности;
- тяжелые манипуляторы свыше 10 т.
При проведении работ следует учитывать показатель, отражающий практические характеристики конструкции при осуществлении погрузки и выгрузки.
Если грузоподъемность крана 10 т, то это вовсе не значит, что этот вес установка сможет поднять и на 2,5 м, и на 12,5 м. В действие вступает закон рычага. Для определения грузового момента необходимо перемножить величину вылета стрелы и грузоподъемность манипуляторной установки.
✎ Виды стрелового оборудования
КМУ имеют стрелы различной конструкции. Виды кранов-манипуляторов делятся на два варианта – шарнирно-выдвижной и тросовый. Их также называют на жесткой и гибкой подвеске. В качестве рабочего элемента для тросового крана применяется лебедка, а для шарнирного – крюк на оголовке последнего звена стрелы.
В качестве дополнительного деления, основным показателем которого является тип складывания стрелы, используется обозначение:
- L-образное;
- Z-образное.

У каждой из этих конструкций имеются достоинства и недостатки. Шарнирно-выдвижное устройство отличается высокой маневренностью и универсальностью. Для них не существует преград, стрела манипулятора способна проникать даже в дверные и оконные проемы на этажах здания. Другим достоинством конструкции является компактное размещение в кузове шасси. При этом основная площадь кузова остается свободной для укладки груза.
Краны, оснащенные лебедкой, позволяют работать на объектах, не обращая внимания на высоту борта кузова шасси, наличие высокого забора, за которым расположен груз. Они могут извлекать поднимаемое имущество из мест, расположенных ниже уровня нахождения шасси. Кроме того, эти КМУ обеспечивают более точное проведение погрузочно-разгрузочных работ и высокую производительность при значительном вылете стрелы. При передвижении стрела крана располагается вдоль шасси, что экономит ресурс передней подвески.
✎ Орган управления
Существует несколько вариантов управления КМУ. С помощью удобной и функциональной системы легче выполнять требования к загрузке платформы крана-манипулятора. Существует несколько вариантов управления рабочим процессом манипулятора, в том числе:
С помощью удобной и функциональной системы легче выполнять требования к загрузке платформы крана-манипулятора. Существует несколько вариантов управления рабочим процессом манипулятора, в том числе:
- с помощью пульта, что применяется на некоторых современных образцах;
- применение органов управления, размещенных на КМУ по обе стороны от крановой установки;
- с применением рычагов, расположенных возле основания стрелы, там же размещается и кресло оператора.
✎ Выдвижные опоры
С помощью аутригеров обеспечивается устойчивость шасси КМУ при выполнении погрузо-разгрузочных работ. Эти устройства бывают как автоматического, так и механического типа.
Для установки устройств автоматической конструкции требуется использование гидромотора манипулятора. С его помощью приводятся в действие специальные гидроцилиндры, осуществляющие фиксацию выдвижных опор. Механические устройства выставляются вручную с последующим закреплением в целях обеспечения безопасности.
✎ Виды шасси
Существует несколько типов шасси, на которые устанавливается конструкция манипулятора. От вида применяемого шасси зависит и порядок допуска рабочих к обслуживанию кранов-манипуляторов. Основной причиной выбора того или иного шасси является перечень задач, для решения которых предназначена техника.
К наиболее распространенным видам шасси относятся:
- на базе грузового автомобиля;
- на платформе гусеничного или колесного трактора;
- на базе прицепа.
Обеспечение безопасности установки
Все краны-манипуляторы оснащаются системой безопасности КМУ. Когда производится техническое освидетельствование кранов-манипуляторов, элементы, обеспечивающие безопасность, проверяются в обязательном порядке. В перечень оборудования, относящегося к системе защиты манипулятора, входят:
- датчики превышения предельной нагрузки и величины вылета стрелы;
- сигнализация, оснащенная звуковым и световым оповещением;
- набор предохранительных клапанов.

Основные производители
На российском рынке доминируют отечественные и корейские производители. Они идеально сочетают требования показателя цена-качество. Стоит выделить технику «Велмаш-С», ЗАО «БАКМ» и ЗАО «Инман». Дополнительным преимуществом нашей техники является отсутствие проблемы с недорогими и качественными запчастями. Среди корейской техники можно выделить таких производителей, как «Dongyang» и «Kanglim».
Японские и европейские марки отличаются высоким качеством и еще более высокой ценой. Шведская компания HIAB выпускает манипуляторы, способные работать в широком диапазоне температур.
Добавлено: 07.07.2020
✅ Как зависит грузоподъемность КМУ от длины стрелы?
Об удобстве грузоперевозок краном-манипулятором столько написано, что нет необходимости объяснять выгоду услуги – он вам и грузчик, он вам и перевозчик!
Многим из нас время от времени приходится пользоваться услугами этих универсальных и «юрких» грузовичков.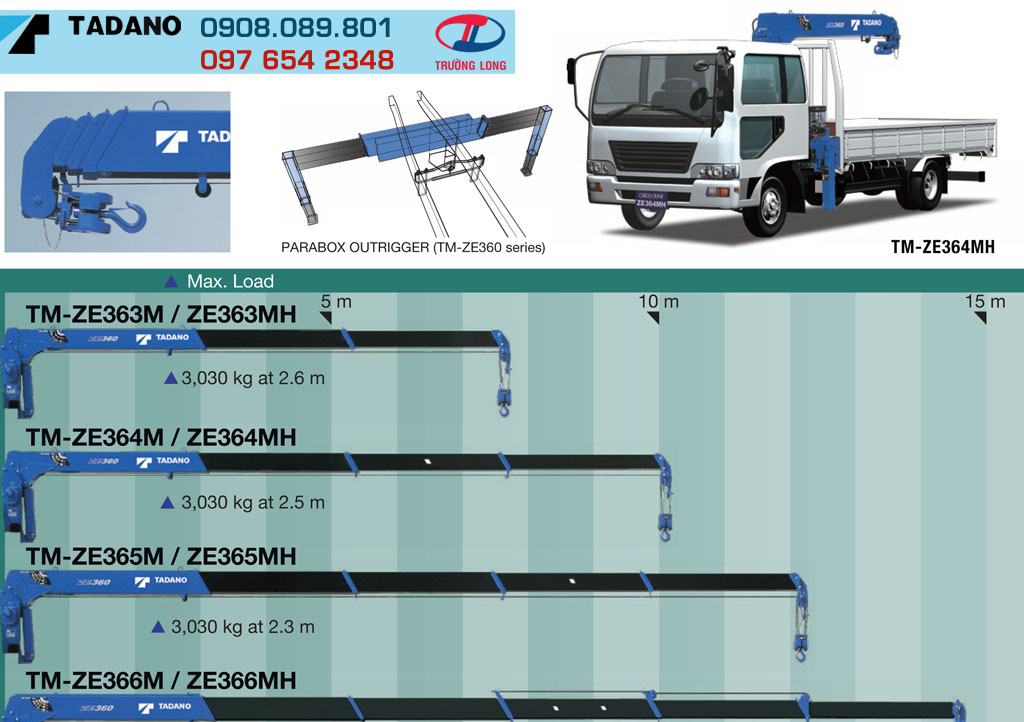
Но так уж устроено общество – каждый преследует свою выгоду и для тех, кто заказывает КМУ впервые, существует реальная опасность быть обманутым недобросовестным поставщиком. Однако, предлагая вам арендовать манипулятор большей грузоподъемности, чем представляется необходимым, исполнитель далеко не всегда стремится «содрать три шкуры» с заказчика и нажиться на его неосведомленности.
К примеру, перевозите вы киоск весом 2 тонны. Подобрали КМУ с грузоподъемностью стрелы 3 тонны. Все правильно? А вот консультант, уточнив расстояние от груза до машины (5 метров) и наличие каких либо помех, утверждает, что на таком расстоянии КМУ может поднять только одну тонну! Да еще советует заказать манипулятор грузоподъемностью целых 7 тонн! Как же так: грузоподъемность 3 тонны, а может поднять только одну?
Все ясно: что-то «мутит» этот исполнитель – решаете вы и бросаетесь на поиски другого.
Не торопитесь делать выводы – на этой странице мы объясним, как проверить, завышает ли арендодатель цену на услуги, или же его рекомендации продиктованы реальными условиями погрузо-разгрузочных работ.
Какая связь между расстоянием до груза и возможностями КМУ
Для того чтобы в этом разобраться мы будем использовать некоторые технические термины, суть которых не так уж трудно понять:
Колонна (башня) – вертикальная сварная конструкция, которая устанавливается на основание, закрепленное на установочной раме автомашины. К ней крепится стрела манипулятора.
Длина стрелы – расстояние от центра оси крепления колонны до противоположного конца стрелы, где находится трос с крюком для крепления груза.
Вылет стрелы – расстояние от вертикальной оси, проходящей через центр колонны до вертикальной оси, проходящей через центр тяжести груза.
Конечно, краноманипуляторная установка – довольно сложный механизм, созданный с использованием знаний точных наук, математических расчетов и законов физики. Однако основой основ работы подъемных механизмов был и остается «простенький» и всем знакомый закон рычага. В нашем случае он будет звучать так: «чем меньше расстояние, тем больший груз может поднять КМУ».
Указанная в технических характеристиках грузоподъемность стрелы – максимальный вес груза, который она может поднять лишь в непосредственной близости. При попытке поднять тот же груз на большем расстоянии, теоретически автомобиль потеряет устойчивость и может опрокинуться. В реальности же автоматика современных манипуляторов не даст даже попытаться поднять груз, во избежание поломок стрелы или механизмов КМУ.
Кроме того, выдвижные секции и гидравлические цилиндры выдерживают только установленные производителем нагрузки. При увеличении длины стрелы увеличиваются и нагрузки на составляющие детали, что отрицательно влияет на прочность всего механизма.
Массу навесного оборудования и тросов тоже следует учитывать при расчете грузоподъемности стрелы манипулятора. Пусть это и не такая уж большая нагрузка на стрелу, но она существует, а значит надо выбирать КМУ с небольшим «запасом» грузоподъемности.
Грузоподъемность КМУ – легко проверить, что нам нужно
Возможно исполнитель, предлагавший вам заказать КМУ большей грузоподъемности для перевозки киоска весом 2 тонны, был прав? Оказывается – вовсе не факт, что манипулятор грузоподъемностью 3 тонны поднимет ваш киоск с расстояния 5 метров!
Менеджер просто оценивает возможности выбранного вами устройства с учетом его грузового момента (произведения веса груза на расстояние до него), который является характеристикой устойчивости автомобиля при погрузо-разгрузочных работах.
Проверим, какой груз (G) может поднять данное устройство с расстояния 5 метров (вылет стрелы – L), если его грузовой момент (M) равен 7,62 т/м:
M = G х L
7,62 = G х 5
G = 7,62/5= 1,5 тонны.
Да, действительно, это невозможно – при попытке поднять груз, тяжелее 1,5 тонн с расстояния 5 метров, автомобиль потеряет устойчивость!
Рассмотрим возможности предлагаемого менеджером крана-манипулятора HYUNDAI HD-210, на который установлена КМУ Kanglim KS 1256GII с грузоподъемностью 7 тонн и грузовым моментом 15 т/м:
M = G х L
15 = G х 5
G = 15/5 = 3 тонны
Выходит, менеджер прав – этот манипулятор справится с задачей, даже если учесть вес самой стрелы, троса и крюка.
Обобщаем опыт
Предложение заказать более мощный манипулятор – далеко не всегда банальный «развод» заказчика на деньги. Для того и нужны консультации специалистов, чтобы подобрать устройство, которое легко справится с поставленной задачей, а клиент при этом не переплатит за оказанные услуги. Добросовестный поставщик всегда уточнит детали предстоящей работы, выслушает пожелания заказчика и посоветует самый выгодный вариант!
Добросовестный поставщик всегда уточнит детали предстоящей работы, выслушает пожелания заказчика и посоветует самый выгодный вариант!
Если вы заказали манипулятор с грузоподъемностью стрелы 3 тонны, а подали авто со стрелой 5 тонн, оплата будет производиться по тарифу трехтонника. Скорее всего, этот автомобиль был свободен в день выполнения заказа, и с вас не возьмут дополнительной оплаты за большую грузоподъемность.
Хотите проверить? Возьмите в аренду манипулятор:
Можно позвонить: +7 (495) 227-30-10.
Можно написать: [email protected].
Можно использовать кнопку «заказать манипулятор».
В любом случае менеджер подберет КМУ с техническими характеристиками, полностью отвечающими параметрам груза. Никаких попыток завысить цену! Совсем наоборот: специалист использует все возможности для снижения затрат!
Электрический подъемный манипулятор колонныимеет грузоподъемность 500 фунтов.
Манипуляторы
Резюме пресс-релиза:
Модель для тяжелых условий эксплуатации Серия ECL разработана как система подъема на малую высоту с шарнирными рычагами на 270° и концевыми эффекторами для выполнения требований к рабочему позиционированию с жесткими допусками. Цепной/звездчатый привод с электроприводом обеспечивает подъем и опускание, а органы управления на конце рычага обеспечивают 3-ступенчатую регулировку высоты по вертикали. Наряду с ходом подъема 54 дюйма и тормозной системой Aut-O-Loc™ продукт оснащен трубчатыми и мостовыми рычагами стандартной длины 72 и 9 мм.2 дюйма
Цепной/звездчатый привод с электроприводом обеспечивает подъем и опускание, а органы управления на конце рычага обеспечивают 3-ступенчатую регулировку высоты по вертикали. Наряду с ходом подъема 54 дюйма и тормозной системой Aut-O-Loc™ продукт оснащен трубчатыми и мостовыми рычагами стандартной длины 72 и 9 мм.2 дюйма
Оригинальный пресс-релиз:
Компания Unidex представляет новые мощные электрические манипуляторы для подъема колонн серии ECL с грузоподъемностью до 500 фунтов.
(СЕНТЯБРЬ 2005 г.) — Unidex, Inc., Варшава, Нью-Йорк представляет свой новый сверхмощный электрический манипулятор с колонной модели ECL с грузоподъемностью до 500 фунтов. Манипулятор ECL представляет собой подъемную систему с малой высотой, шарнирными рычагами с углом поворота 270° и концевыми эффекторами для выполнения требований к рабочему позиционированию с жесткими допусками. По данным Unidex, новые манипуляторы серии ECL обладают удвоенной грузоподъемностью по сравнению со стандартными моделями и оснащены цепным/звездчатым приводом с электрическим приводом, который обеспечивает подъем и опускание, а органы управления на конце стрелы обеспечивают трехскоростную регулировку высоты по вертикали.
Новый манипулятор большой грузоподъемности серии ECL имеет стандартный ход подъема 54 дюйма и грузоподъемность 500 фунтов на расстоянии 96 дюймов от центральной линии. Тормозная система Aut-O-Loc™ обеспечивает надежную поддержку и защищает оператора от движения вниз в случае отказа цепи или привода. Трубчатые и мостовые рычаги имеют стандартную длину 72 дюйма и 92 дюйма от каретки до конца шарнира рычага. В компании говорят, что шарнирные рычаги с ручным управлением доступны с радиальным вылетом до 96 дюймов.
Unidex заявляет, что новый манипулятор серии ECL является последним дополнением к обширной линейке эргономичного погрузочно-разгрузочного оборудования и может быть оснащен различными дополнительными функциями, включая:
o Нержавеющая сталь для строительства в санитарных или агрессивных средах и
с покрытием для защиты от коррозии. (Доступны другие специальные материалы и отделки.)
(Доступны другие специальные материалы и отделки.)
o Разные ходы подъема и грузоподъемность.
o Шарнирные рычаги различной длины и конструкции.
o Стандартные и индивидуальные концевые зажимы.
o Рычажное, кнопочное или подвесное управление.
o Потолочные монтажные системы.
О Мобильные установки.
Для получения бесплатной литературы и дополнительной информации обращайтесь в Unidex, Inc., 2416 Main Street, Warsaw, NY 14569. Бесплатный номер: 1-800-724-1302. Телефон: 585-786-3170. Факс: 585-786-3223. Электронная почта: [email protected]. URL-адрес: www.unidex-inc.com. Конкретная информация о продукте в Интернете по адресу: unidex-inc.com/pg_pages/m_ed.htm.
По вопросам обслуживания читателей обращайтесь по адресу:
Сью Гарднер, вице-президент по продажам, Unidex, Inc.
Электронная почта: [email protected]
Свяжитесь с этой компанией
Больше из Обработка и хранение материалов
Просмотреть все официальные документы и тематические исследования
Просмотреть все ресурсы
- Аддитивное производство/3D-производство
- Автоматика
- Предприниматели
- Промышленность 4. 0
- Технология
 0
0- Бизнес и промышленность
- Нормативно-правовой акт
- Перекрепление
- CAD и BIM
- Изготовление на заказ
- СТЕРЖЕНЬ
- Маркетинг по электронной почте
- События
- Лидогенерация
- Маркетинг
- Ретаргетинг
- ROI и аналитика
- Стратегия продаж
- SEO
- Социальные сети
- Стратегия веб-сайта
- Клеи и герметики
- Сельскохозяйственные и фермерские продукты
- Изделия для архитектурного и гражданского строительства
- Автоматический ID
- Химикаты и газы
- Чистящие средства и оборудование
- Системы связи и оборудование
- Компьютерное оборудование и периферийные устройства
- Строительное оборудование и принадлежности
- Элементы управления и контроллеры
- Изготовление на заказ
- Дисплейное и презентационное оборудование
- Электрооборудование и системы
- Электронные компоненты и устройства
- Взрывчатые вещества, вооружение и вооружение
- Крепеж и скобяные изделия
- Оборудование для измерения расхода жидкости и газа
- Пищевая промышленность и приготовление
- Товары и оборудование для здоровья, медицины и стоматологии
- ОВКВ
- Этикетки Теги Вывески и оборудование
- Принадлежности и оборудование для лабораторий и исследований
- Смазочные материалы
- Машины и инструменты для обработки
- Транспортировка и хранение материалов
- Обработка материалов
- Материалы
- Механические компоненты и узлы
- Механическая передача мощности
- Горнодобывающая промышленность, бурение нефтяных скважин, продукты и оборудование для переработки
- Изделия для монтажа и крепления
- Непромышленные товары
- Оптика и фотоника
- Упаковочные продукты и оборудование
- Краски и покрытия
- Мебель для растений и аксессуары
- Портативные инструменты
- Печатное и копировальное оборудование
- Оборудование для розничной торговли и продаж
- Робототехника
- Оборудование для обеспечения безопасности
- Датчики, мониторы и преобразователи
- Услуги
- Программное обеспечение
- Испытания и измерения
- Продукция текстильной промышленности
- Тепловое и отопительное оборудование
- Таймеры и часы
- Продукция транспортной отрасли
- Системы технического зрения
- Управление отходами и оборудование для обработки отходов
- Сварочное оборудование и расходные материалы
Найдите и оцените OEM-производителей, производителей на заказ, сервисные компании и дистрибьюторов.
Будьте в курсе отраслевых новостей и тенденций, анонсов продуктов и последних инноваций.
Найдите материалы, комплектующие, оборудование, расходные материалы для техобслуживания и многое другое.
Более 10 миллионов моделей от ведущих OEM-производителей, совместимых со всеми основными программными системами САПР.
Начать поиск поставщиков Заявите о профиле своей компании ico-arrow-default-right ico-поставщикБолее 500 000 подробных профилей поставщиков
ico-white-paper-case-studyБолее 300 000 статей и технических документов
ico-product6 миллионов+ промышленных товаров
ico-cadБолее 10 миллионов 2D- и 3D-чертежей САПР
Разработка системы и контроль соответствия
Чтобы удовлетворить требования космической среды к легкому весу и грузоподъемности манипулятора, в этой статье разработан легкий космический манипулятор весом 90,23 кг и нагрузка 2 кг. Он использует протокол связи EtherCAT и обладает характеристиками высокого отношения нагрузки к весу. Для достижения постоянного отслеживания силы в условиях неизвестных параметров окружающей среды предлагается метод интегрального адаптивного управления адмиттансом. Закон управления выражается в виде уравнения линейной системы третьего порядка, рабочая среда эквивалентна модели пружины, и выводится передаточная функция ошибки управления. Далее анализируется эффективность управления при переходной характеристике. Результаты моделирования показывают, что предложенный метод интегрального адаптивного управления проводимостью имеет лучшие характеристики, чем традиционный метод. Он не имеет установившейся ошибки, преодолевает проблемы, вызванные нелинейной дискретной компенсацией, и может облегчить анализ в частотной области, реализовать оптимизацию параметров и повысить точность вычислений.
Он использует протокол связи EtherCAT и обладает характеристиками высокого отношения нагрузки к весу. Для достижения постоянного отслеживания силы в условиях неизвестных параметров окружающей среды предлагается метод интегрального адаптивного управления адмиттансом. Закон управления выражается в виде уравнения линейной системы третьего порядка, рабочая среда эквивалентна модели пружины, и выводится передаточная функция ошибки управления. Далее анализируется эффективность управления при переходной характеристике. Результаты моделирования показывают, что предложенный метод интегрального адаптивного управления проводимостью имеет лучшие характеристики, чем традиционный метод. Он не имеет установившейся ошибки, преодолевает проблемы, вызванные нелинейной дискретной компенсацией, и может облегчить анализ в частотной области, реализовать оптимизацию параметров и повысить точность вычислений.
1. Введение
Космические роботы развиваются в направлении интеллекта и легкости [1]. Легкий космический манипулятор не только отвечает потребностям аэрокосмической промышленности в снижении веса, но также обладает характеристиками высокого отношения нагрузки к весу. Это может заставить космический манипулятор иметь меньшую силу инерции при работе космического манипулятора в космосе, тем самым улучшая скорость отклика космического манипулятора [2-6].
Легкий космический манипулятор не только отвечает потребностям аэрокосмической промышленности в снижении веса, но также обладает характеристиками высокого отношения нагрузки к весу. Это может заставить космический манипулятор иметь меньшую силу инерции при работе космического манипулятора в космосе, тем самым улучшая скорость отклика космического манипулятора [2-6].
Основными методами реализации контроля соответствия манипулятора являются активное соответствие и пассивное соответствие. Пассивная податливость реализуется за счет установки на конце гибкого тела или эластомера, а активная податливость реализуется за счет силово-позиционного гибридного управления, контроля импеданса и т. д. [7, 8]. Управление импедансом заключается в настройке параметров импеданса системы, включая параметры инерции, параметры демпфирования и параметры жесткости в соответствии с положением, скоростью, ускорением, силой и обратной связью по моменту конца манипулятора, чтобы достичь цели управления концом.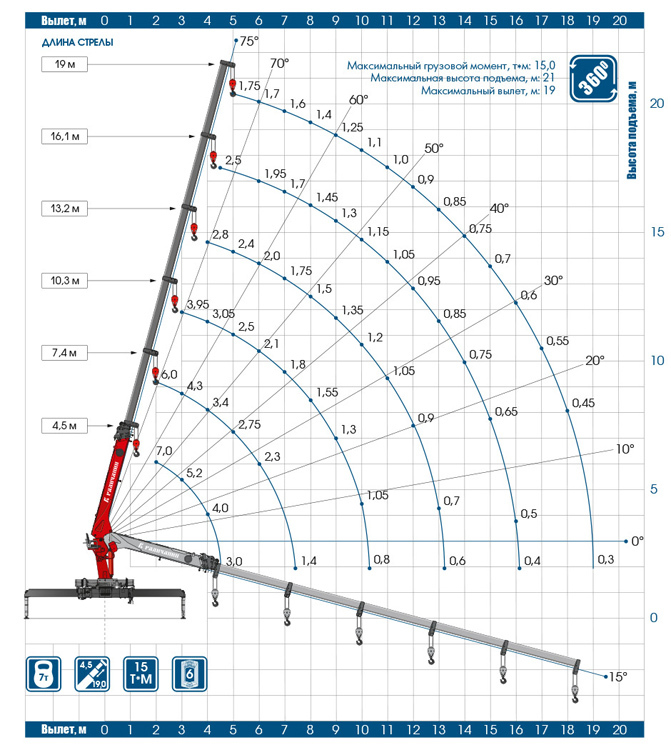 усилие и крутящий момент. Управление импедансом подразделяется на управление импедансом при управлении совместной силой и контроль допуска при управлении положением сустава [3]. Управление импедансом на основе управления совместной силой требует параметров динамической модели манипулятора, поэтому манипулятор должен поддерживать режим управления силой. Однако для управления допуском манипулятору робота необходимо только обеспечить режим управления положением, поэтому область его применения шире [9].]. Когда фактическая жесткость, демпфирование, фактическое положение и другие параметры среды не соответствуют теоретическим значениям, заданное желаемое положение не соответствует положению окружающей среды, что приводит к плохому эффекту контроля конечной силы. Поэтому исследователь вводит адаптивный термин для корректировки желаемого положения или желаемой скорости в реальном времени в соответствии с погрешностью силы [10]. Адаптивная составляющая представляет собой дискретную компенсационную составляющую, относящуюся к погрешности усилия, которую можно добавить к погрешности скорости или погрешности положения.
усилие и крутящий момент. Управление импедансом подразделяется на управление импедансом при управлении совместной силой и контроль допуска при управлении положением сустава [3]. Управление импедансом на основе управления совместной силой требует параметров динамической модели манипулятора, поэтому манипулятор должен поддерживать режим управления силой. Однако для управления допуском манипулятору робота необходимо только обеспечить режим управления положением, поэтому область его применения шире [9].]. Когда фактическая жесткость, демпфирование, фактическое положение и другие параметры среды не соответствуют теоретическим значениям, заданное желаемое положение не соответствует положению окружающей среды, что приводит к плохому эффекту контроля конечной силы. Поэтому исследователь вводит адаптивный термин для корректировки желаемого положения или желаемой скорости в реальном времени в соответствии с погрешностью силы [10]. Адаптивная составляющая представляет собой дискретную компенсационную составляющую, относящуюся к погрешности усилия, которую можно добавить к погрешности скорости или погрешности положения. Скорость обновления в адаптивном элементе оказывает большое влияние на эффективность управления. Исследователи используют нейронные сети, нечеткое управление и другие теории, чтобы получить соответствующую частоту обновления для повышения эффективности адаптивного управления импедансом [11–14]. Добавляя дискретные элементы компенсации, можно реализовать управление постоянным усилием и улучшить реакцию управления. Однако дискретный компенсационный член превращает выражение проводимости в нелинейное выражение, и его трудно преобразовать в частотную область для анализа параметров, и невозможно использовать гиперболическое преобразование в -функцию для получения решения дифференциального уравнения. Ее можно решить только итерационным методом, имеющим низкую точность [15].
Скорость обновления в адаптивном элементе оказывает большое влияние на эффективность управления. Исследователи используют нейронные сети, нечеткое управление и другие теории, чтобы получить соответствующую частоту обновления для повышения эффективности адаптивного управления импедансом [11–14]. Добавляя дискретные элементы компенсации, можно реализовать управление постоянным усилием и улучшить реакцию управления. Однако дискретный компенсационный член превращает выражение проводимости в нелинейное выражение, и его трудно преобразовать в частотную область для анализа параметров, и невозможно использовать гиперболическое преобразование в -функцию для получения решения дифференциального уравнения. Ее можно решить только итерационным методом, имеющим низкую точность [15].
Кроме того, Karami et al. предложил конструкцию стабилизатора с обратной связью по состоянию на основе наблюдателя для класса хаотических систем с внешними возмущениями и липшицевой нелинейностью. Они использовали линейные матричные неравенства для получения параметров стабилизатора и наблюдателя, что привело к сходимости ошибки состояния к началу координат [16]. Эсмаилзаде и др. предложили новый контроллер и адаптивный механизм для решения задачи фиксированного управления ориентацией гибкого космического корабля в условиях отказа привода, внешнего возмущения и гибкой связи мод [17]. Пухоль-Васкес и др. использовать технологию линейного матричного неравенства для разработки эффективного управления с обратной связью по выходу и предложить надежный контроллер, зависящий от задержки, на основе теории H∞ [18]. Расулинасаб и др. предложил робастный стабилизатор для неголономных систем с изменяющимися во времени временными задержками и нелинейными возмущениями. И использовать функцию Ляпунова-Красовского для вывода асимптотической устойчивости ее метода управления с обратной связью [19].].
Эсмаилзаде и др. предложили новый контроллер и адаптивный механизм для решения задачи фиксированного управления ориентацией гибкого космического корабля в условиях отказа привода, внешнего возмущения и гибкой связи мод [17]. Пухоль-Васкес и др. использовать технологию линейного матричного неравенства для разработки эффективного управления с обратной связью по выходу и предложить надежный контроллер, зависящий от задержки, на основе теории H∞ [18]. Расулинасаб и др. предложил робастный стабилизатор для неголономных систем с изменяющимися во времени временными задержками и нелинейными возмущениями. И использовать функцию Ляпунова-Красовского для вывода асимптотической устойчивости ее метода управления с обратной связью [19].].
Ввиду недостатков описанного выше метода, связанных с добавлением дискретных компенсационных членов, в данной статье предлагается интегральный алгоритм адаптивного управления, основанный на адмиттансе, который представляет собой линейную систему третьего порядка, не содержащую дискретных компенсационных членов. Интегральное адаптивное управление проводимостью добавляет интегральный член ошибки силы, который решает проблему установившейся ошибки управления силой в традиционной проводимости. А система управления представляет собой линейную систему третьего порядка без нелинейных временных членов. Анализ производительности может быть выполнен в частотной области. Упростите среду до пружинной модели. Выводятся передаточная функция реакции на ожидаемую силу и передаточная функция реакции на ошибку окружающей среды, а переходная характеристика используется в качестве индекса оценки для анализа влияния параметров управления на эффективность управления.
Интегральное адаптивное управление проводимостью добавляет интегральный член ошибки силы, который решает проблему установившейся ошибки управления силой в традиционной проводимости. А система управления представляет собой линейную систему третьего порядка без нелинейных временных членов. Анализ производительности может быть выполнен в частотной области. Упростите среду до пружинной модели. Выводятся передаточная функция реакции на ожидаемую силу и передаточная функция реакции на ошибку окружающей среды, а переходная характеристика используется в качестве индекса оценки для анализа влияния параметров управления на эффективность управления.
2. Lightweight Space Manipulator Structure Design
The index of the manipulator designed in this paper is shown in Table 1.
| |||||||||||||||||||
 12 mm
12 mm The shoulder and elbow joints adopt the same design scheme, adopting an integral harmonic дизайн, а лучезапястный сустав имеет сплит-гармонический дизайн. Плечевой сустав показан на рисунке 1(а). Абсолютный энкодер устанавливается на конце двигателя для облегчения соединения привода с энкодером и электрическими проводами двигателя. Вал двигателя имеет полую конструкцию, что снижает качество и реализует внутреннюю проводку. Проволочная трубка напечатана на 3D-принтере и прикреплена к корпусу, чтобы предотвратить повреждение проводов высокоскоростным вращающимся валом двигателя. Усовершенствованная конструкция встроенного гармонического редуктора типа ЖК-дисплея, увеличено центральное отверстие и реализована полая проводка. Мы используем бескаркасный моментный двигатель, который имеет стабильный выходной крутящий момент, простую конструкцию и низкое качество. Конструкция лучезапястного сустава показана на рисунке 1(а). Используйте отдельный гармонический редуктор. Его круговая шпонка закреплена на корпусе шарнира, генератор волн соединен с валом двигателя, а гибкая шпонка соединена с выходным валом. Среди них генератор волн расширяет центральное отверстие и реализует полую проводку. Выходной вал фиксируется поперечными роликоподшипниками для повышения точности и надежности. В остальном конструкция аналогична плечевому суставу.
Конструкция лучезапястного сустава показана на рисунке 1(а). Используйте отдельный гармонический редуктор. Его круговая шпонка закреплена на корпусе шарнира, генератор волн соединен с валом двигателя, а гибкая шпонка соединена с выходным валом. Среди них генератор волн расширяет центральное отверстие и реализует полую проводку. Выходной вал фиксируется поперечными роликоподшипниками для повышения точности и надежности. В остальном конструкция аналогична плечевому суставу.
В этом документе изогнутый цилиндр, показанный на рис. 2, используется для поворота на 90°. Электрическая схема установлена внутри, что улучшает усилие Г-образного адаптера и повышает эстетичность. Шатун имеет отверстие по окружности в вертикальном направлении, что удобно для монтажа и демонтажа. В боковом направлении осевое отверстие используется для повышения надежности соединения, а тонкая закрывающая часть предназначена для закрытия бокового соединения. В вертикальном направлении шатуна зарезервировано большое пространство для установки привода и разделения привода и шарнира. Манипулятор робота использует конфигурацию SRS, а 6 изогнутых шатунов последовательно соединены с 7 шарнирами. Он соединен с оптической платформой через основание, а его основными компонентами являются в основном шарниры, изогнутые шатуны, основания и трехмерные оболочки. Общая масса манипулятора робота составляет 9 г.0,23 кг, номинальная нагрузка составляет 2 кг, а точность повторного позиционирования составляет 0,12 мм, что соответствует требованиям расчетного индекса.
Манипулятор робота использует конфигурацию SRS, а 6 изогнутых шатунов последовательно соединены с 7 шарнирами. Он соединен с оптической платформой через основание, а его основными компонентами являются в основном шарниры, изогнутые шатуны, основания и трехмерные оболочки. Общая масса манипулятора робота составляет 9 г.0,23 кг, номинальная нагрузка составляет 2 кг, а точность повторного позиционирования составляет 0,12 мм, что соответствует требованиям расчетного индекса.
3. Интегральный алгоритм адаптивного управления допуском
В основном существует два метода адаптивного управления допуском. Во-первых, это компенсация в члене положения, а формула управления с одной степенью свободы выглядит следующим образом:
Срок компенсации в формуле выглядит следующим образом: где – коэффициент обновления, – контрольный период.
Второй тип — это компенсация в терминах скорости, и приведенная формула выглядит следующим образом:
Срок компенсации в формуле показан в следующей формуле:
Уравнения (1) и (4) содержат дискретные условия компенсации. Теоретический анализ сложен, и его можно решить только путем итерации, а ошибка решения относительно велика. Теперь выведите два компенсационных члена, предполагая, что период бесконечно мал, на основе дифференциальной теории мы можем получить следующее:
Теоретический анализ сложен, и его можно решить только путем итерации, а ошибка решения относительно велика. Теперь выведите два компенсационных члена, предполагая, что период бесконечно мал, на основе дифференциальной теории мы можем получить следующее:
Подставив (7) в (2) и (5), можно получить следующую формулу:
На основе приведенного выше вывода и расширения от одной степени свободы до 6 степеней свободы получено новое адаптивное выражение импеданса (9), блок-схема его управления показана на рисунке 3, где — интегральный коэффициент силовой ошибки; – модифицированный закон управления внешним контуром.
Как показано на рис. 3, мы учитываем влияние входного насыщения и определяем функцию насыщения, как показано ниже. где – граница насыщения .
Уравнение (9) можно рассматривать как пропорциональное интегральное управление погрешностью усилия, а установившаяся погрешность устраняется интегральным членом. По сравнению с традиционным алгоритмом адаптивного управления проводимостью интегральный алгоритм адаптивного управления проводимостью не включает дискретный компенсационный член и представляет собой линейную систему третьего порядка. Установившиеся и динамические характеристики алгоритма интегрального адаптивного управления полной проводимостью можно проанализировать с помощью преобразования Лапласа в частотную область, и можно использовать традиционный метод анализа в частотной области. Гиперболическую дискретизацию можно использовать для получения дискретных дифференциальных уравнений повышенной точности, что удобно при проектировании цифровых регуляторов.
Установившиеся и динамические характеристики алгоритма интегрального адаптивного управления полной проводимостью можно проанализировать с помощью преобразования Лапласа в частотную область, и можно использовать традиционный метод анализа в частотной области. Гиперболическую дискретизацию можно использовать для получения дискретных дифференциальных уравнений повышенной точности, что удобно при проектировании цифровых регуляторов.
Поскольку шесть степеней свободы на конце манипулятора не зависят друг от друга, матрица параметров представляет собой диагональную матрицу. Для упрощения вывода выдвигается только одна из степеней свободы. Используйте строчные буквы для обозначения одной степени свободы, а обозначения следующие, указывающие на ошибку положения и ошибку усилия соответственно;
В уравнении (9) преобразование Лапласа с одной степенью свободы выглядит следующим образом:
Путем гиперболического преобразования можно получить следующее:
Выражение дискретной разности для получения поправки выглядит следующим образом:
Согласно рис. 3 видно, что входные данные внутреннего контура управления положением представляют собой отклонение скорректированного угла соединения () и фактического выходного угла () робота. Выходом внутреннего контура управления положением является текущий угол соединения роботизированной системы. Согласно приведенному выше отклонению, контроллер двигателя каждого сустава в роботе основан на ПИД-регулировании контура положения, чтобы заставить каждый сустав робота достигать желаемого положения сустава, чтобы реализовать управление внутренним контуром импеданса.
3 видно, что входные данные внутреннего контура управления положением представляют собой отклонение скорректированного угла соединения () и фактического выходного угла () робота. Выходом внутреннего контура управления положением является текущий угол соединения роботизированной системы. Согласно приведенному выше отклонению, контроллер двигателя каждого сустава в роботе основан на ПИД-регулировании контура положения, чтобы заставить каждый сустав робота достигать желаемого положения сустава, чтобы реализовать управление внутренним контуром импеданса.
Для облегчения выбора параметров и теоретического анализа рассматривается только внешний контур управления проводимостью. Приведенная выше блок-схема управления упрощена как система управления с ожидаемой силой на входе, фактической силой на выходе и разницей между ожидаемым положением и положением окружающей среды в качестве возмущения. В этой статье сделаны следующие предположения:
(1) Манипулятор — это идеальный манипулятор, который может обеспечить идеальное отслеживание заданного положения: (2) Разница между ожидаемым положением и статическим положением окружающей среды рассматривается как возмущение: (3) Механическое рука может быть заменена пружинной моделью для окружающей среды, где — фактическое положение концевого эффектора манипулятора, — положение окружающей среды в состоянии покоя, — сила, действующая манипулятором на окружающую среду, и — эквивалентная жесткость Окружающая среда и роботизированная рука.
Исходя из вышеизложенных предположений, внешний контур интегрального адаптивного управления проводимостью можно рассматривать как независимую систему управления, входом которой является требуемая сила, а выходом . Блок-схема управления показана на рисунке 4.
Предполагается, что среда представляет собой пружинную модель. После упрощенной системы соотношение между выходом и входом с одной степенью свободы и возмущением выглядит следующим образом:
При рассмотрении только взаимосвязи между ожидаемой входной силой и выходной силой формула передачи с обратной связью выглядит следующим образом:
При рассмотрении только взаимосвязи между возмущением и выходной силой формула передачи с обратной связью выглядит следующим образом:
Из формулы (16) видно, что упрощенная система является линейной системой третьего порядка, и критерий Рауса можно использовать для анализа ее устойчивости напрямую, без использования функции Ляпунова для нахождения ее устойчивости. Поскольку все параметры системы представляют собой диагональные матрицы, можно рассматривать только одну степень свободы системы. Характеристическое уравнение замкнутой функции системы имеет следующий вид:
Поскольку все параметры системы представляют собой диагональные матрицы, можно рассматривать только одну степень свободы системы. Характеристическое уравнение замкнутой функции системы имеет следующий вид:
Поскольку параметры импеданса , , и параметр жесткости среды неотрицательны, необходимое условие критерия установлено. Необходимое и достаточное условие критерия состоит в том, что первый столбец матрицы Рауса больше нуля. Найдите первый столбец матрицы Рауса:
Поскольку можно получить диапазон значений.
Для жесткой среды жесткость среды намного больше, чем жесткость импеданса, и можно получить следующую формулу:
Из уравнений (20) и (22) видно, что до тех пор, пока выбрано соответствующее значение, интегральная адаптивная система управления проводимостью может оставаться стабильной. Из формул (8) и (9) видно, что интегральный параметр в интегральном адаптивном управлении полной проводимостью совпадает с параметром частоты обновления адаптивного управления полной проводимостью в эталоне, но поскольку традиционное адаптивное управление полной проводимостью включает в себя дискретную компенсацию п. , более точный метод решения применить невозможно, а диапазон его значений равен . После принятия интегрального адаптивного управления полной проводимостью диапазон значений интегрального параметра равен , поэтому устойчивость интегрального адаптивного управления полной проводимостью выше.
, более точный метод решения применить невозможно, а диапазон его значений равен . После принятия интегрального адаптивного управления полной проводимостью диапазон значений интегрального параметра равен , поэтому устойчивость интегрального адаптивного управления полной проводимостью выше.
Для изучения влияния интегральных параметров адаптивного управления проводимостью в данной статье в качестве фиксированных величин выбран набор параметров , , , и . При анализе влияния одного из параметров остальные параметры являются, соответственно, фиксированными значениями.
Выберите набор значений и начертите требуемый график реакции на скачок усилия, чтобы изучить влияние каждого параметра. Как показано на рисунке 5, по мере увеличения параметра инерции m перерегулирование увеличивается, а отклик замедляется, поэтому параметр инерции обычно принимает значение . По мере увеличения параметра демпфирования перерегулирование уменьшается, а отклик замедляется, поэтому параметр демпфирования обычно выбирается равным . По мере увеличения параметра жесткости проводимости скорость отклика будет снижаться. Следовательно, при управлении постоянной силой, если для параметра жесткости проводимости установлено значение , характеристики динамического отклика будут лучше. Интегральный член в основном влияет на быстродействие отслеживания мощности, но по мере увеличения интегрального параметра очевидно увеличивается выброс. Как правило, от 1 до 10 более уместно.
По мере увеличения параметра жесткости проводимости скорость отклика будет снижаться. Следовательно, при управлении постоянной силой, если для параметра жесткости проводимости установлено значение , характеристики динамического отклика будут лучше. Интегральный член в основном влияет на быстродействие отслеживания мощности, но по мере увеличения интегрального параметра очевидно увеличивается выброс. Как правило, от 1 до 10 более уместно.
Для изучения влияния окружающей среды и эквивалентных параметров жесткости манипулятора в данной работе выбирается набор эквивалентных параметров жесткости и соответственно получаются диаграммы переходной характеристики требуемой единицы силы. Диаграммы реакции показаны на рисунке 5(e), из которого видно, что чем меньше эквивалентная жесткость среды и манипулятора, тем медленнее реакция. По мере увеличения эквивалентной жесткости реакция системы ускоряется, а перерегулирование увеличивается. Эквивалентная жесткость среды и робота не может быть изменена, поэтому необходимо настроить 4 параметра интегральной самоадаптации для соответствия среде и достижения наилучшего управления реакцией.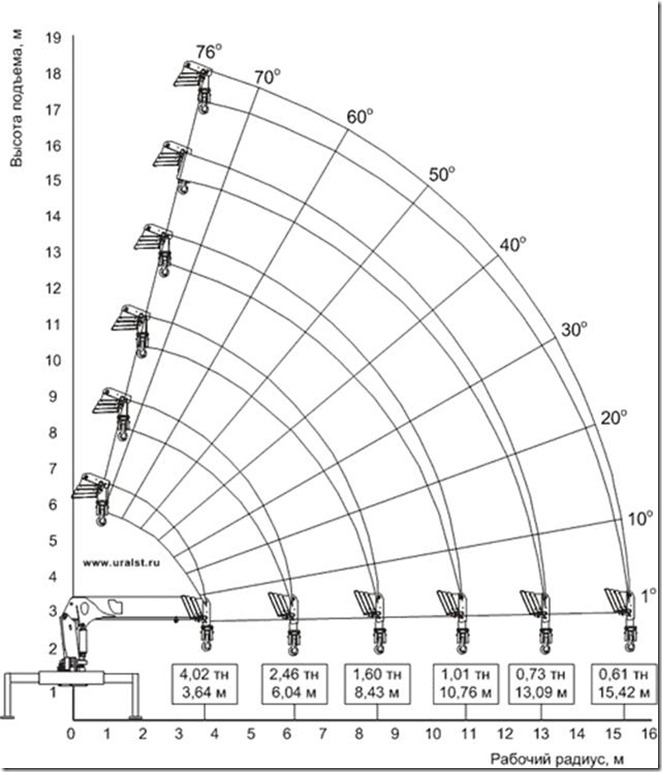
4. Моделирование интегрального адаптивного управления допуском
Моделирование проводится с условиями, аналогичными реальному управлению, среда заменена пружинной моделью, а среда изменяемой криволинейной поверхности предназначена для изучения быстрого отклика. Жесткость окружающей среды устанавливается так, чтобы передать фактическое измеренное значение эквивалентной жесткости, сила обратной связи добавляется со случайным шумом ±0,2 Н, а искаженные шумом данные восстанавливаются через фильтр нижних частот. Блок-схема моделирования показана на рисунке 6.9.0003
В этой статье рассматривается только одна степень свободы, сила управляет направлением -оси, -направление является постоянной величиной, а направление -оси представляет собой линейное движение. Установите функцию синуса в среде направления оси, чтобы имитировать движение руки робота по прямой линии в неизвестной среде. Установите окружающую среду, как показано на кривой, показанной на рисунке 7 (а), первые 10 с — фиксированное положение, последние 20 с — положение синусоидального изменения, на 10 с резкое изменение кривизны окружающей среды, ожидаемое сила представляет собой кривую, показанную на рисунке 7 (b), первые 10 с представляют собой полиномиальную силу плавной нагрузки пятой степени, и поддерживают постоянную силу после 20 с. Соответственно, проверьте эффект фиксированного отслеживания силы окружающей среды, надежность мутации кривизны и постоянный эффект отслеживания силы неизвестной среды.
Соответственно, проверьте эффект фиксированного отслеживания силы окружающей среды, надежность мутации кривизны и постоянный эффект отслеживания силы неизвестной среды.
Предполагая Н/м, используя второе выражение традиционного адаптивного управления проводимостью, установите параметры проводимости , , , и , и отслеживание силы, полученное после моделирования, показано на рисунке 8. Можно видеть, что реакция слишком медленная, чтобы быстро отслеживать меняющуюся обстановку.
Используя метод интегрального адаптивного управления проводимостью, предложенный в этой статье, задайте параметры проводимости , , , и , и кривая управления силой показана на рисунке 9. На этапе отслеживания постоянной силы с фиксированной точкой кривая силы может быть идеально отслеживаются. Когда s, кривизна окружающей среды резко меняется. По сравнению с традиционной адаптивной проводимостью, благодаря интегральному адаптивному управлению проводимостью, механическая рука сходится быстрее после внезапного изменения силы. В среде с неизвестной изогнутой поверхностью с непрерывной кривизной среда колеблется в пределах ± 10 мм, но манипулятор все еще может хорошо отслеживать окружающую среду, сохраняя ошибку силы слежения на уровне ± 0,1 Н, и эффект отслеживания хороший.
В среде с неизвестной изогнутой поверхностью с непрерывной кривизной среда колеблется в пределах ± 10 мм, но манипулятор все еще может хорошо отслеживать окружающую среду, сохраняя ошибку силы слежения на уровне ± 0,1 Н, и эффект отслеживания хороший.
Сравнивая интегральную адаптивную проводимость и традиционное адаптивное управление проводимостью, можно увидеть, что они могут хорошо отслеживать изменения ожидаемой силы в фиксированном положении. Однако, когда искривление окружающей среды является резким или частота изменений положения окружающей среды высока, эффект интегрального адаптивного управления проводимостью, очевидно, лучше, чем эффект традиционного адаптивного управления проводимостью.
5. Эксперименты и результаты
Целью эксперимента по отслеживанию силы с фиксированной точкой является изучение того, может ли интегральная адаптация отслеживать ожидаемую силу преобразования. Используя интегральное адаптивное управление проводимостью, учитывается только направление оси, заданные параметры управления , и и . Ожидаемая сила, ожидаемая сила и прижимная сила показаны на рисунке 10(а). Фактическая прижимная сила содержит высокочастотный шум. В этой статье для фильтрации высокочастотного шума используется КИХ-фильтр с конечной импульсной характеристикой. Все фильтры в следующем тексте используют этот фильтр. Разница между ожидаемой силой и фактической контактной силой используется для получения ошибки прижимной силы, как показано на рисунке 10(b). Ошибка слежения составляет ±0,8 N, а эффект слежения хороший.
Ожидаемая сила, ожидаемая сила и прижимная сила показаны на рисунке 10(а). Фактическая прижимная сила содержит высокочастотный шум. В этой статье для фильтрации высокочастотного шума используется КИХ-фильтр с конечной импульсной характеристикой. Все фильтры в следующем тексте используют этот фильтр. Разница между ожидаемой силой и фактической контактной силой используется для получения ошибки прижимной силы, как показано на рисунке 10(b). Ошибка слежения составляет ±0,8 N, а эффект слежения хороший.
Использование метода интегрального адаптивного управления проводимостью, предложенного в данной статье, позволяет решать сложные практические задачи, такие как полировка поверхности. В прошлом постоянный контроль силы в основном был сосредоточен на постоянном контроле силы в плоской среде. При постоянном силовом управлении плоскостью направление управляющей силы постоянно, но для криволинейной поверхности в неизвестной среде ее вектор нормали часто изменяется в реальном времени, поэтому традиционный метод не работает.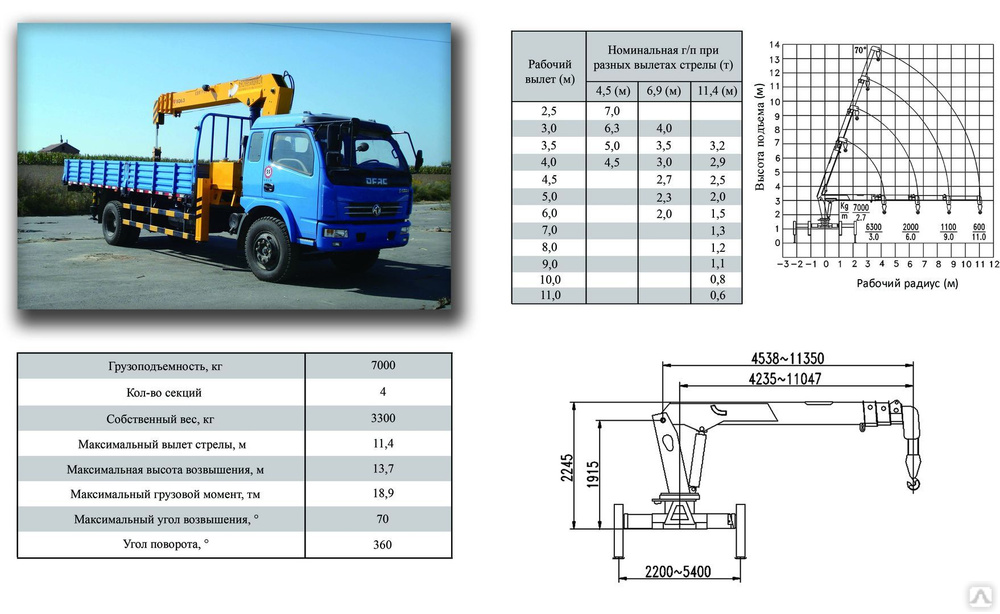 Чтобы преодолеть эту трудность, в статье предлагается интегральное адаптивное управление проводимостью, которое может реализовать коррекцию желаемого положения конца манипулятора в реальном времени, чтобы он находился в полном контакте, и реализовать управление постоянной силой. Традиционный допуск может преобразовать ошибку усилия в ошибку положения и исправить некоторую ошибку между ожидаемым положением и окружающей средой, но диапазон коррекции ограничен, и это приведет к установившейся ошибке управления силой. Интегральное адаптивное управление проводимостью в этой статье может использоваться для управления постоянной силой, когда положение окружающей среды неизвестно. Интегральный член устраняет установившуюся ошибку управления усилием и непрерывно корректирует желаемое положение, чтобы привести его в контакт с окружающей средой. Экспериментальная сцена показана на рис. 11. Неизвестная криволинейная поверхность помещается на оптическую платформу, конец манипулятора перемещается на маленькую плоскость слева, а управление постоянной силой с фиксированной точкой используется для приведения робота в движение.
Чтобы преодолеть эту трудность, в статье предлагается интегральное адаптивное управление проводимостью, которое может реализовать коррекцию желаемого положения конца манипулятора в реальном времени, чтобы он находился в полном контакте, и реализовать управление постоянной силой. Традиционный допуск может преобразовать ошибку усилия в ошибку положения и исправить некоторую ошибку между ожидаемым положением и окружающей средой, но диапазон коррекции ограничен, и это приведет к установившейся ошибке управления силой. Интегральное адаптивное управление проводимостью в этой статье может использоваться для управления постоянной силой, когда положение окружающей среды неизвестно. Интегральный член устраняет установившуюся ошибку управления усилием и непрерывно корректирует желаемое положение, чтобы привести его в контакт с окружающей средой. Экспериментальная сцена показана на рис. 11. Неизвестная криволинейная поверхность помещается на оптическую платформу, конец манипулятора перемещается на маленькую плоскость слева, а управление постоянной силой с фиксированной точкой используется для приведения робота в движение. рука достигает устойчивой постоянной силы, а затем начинает идти по прямой линии вправо (заданное желаемое положение является прямой линией). Заданное желаемое положение и требуемая сила показаны на рисунке 12. Благодаря интегральному адаптивному управлению проводимостью в реальном времени реализуется коррекция желаемого положения конца манипулятора, так что он находится в контакте с поверхностью, и постоянная сила реализуется контроль.
рука достигает устойчивой постоянной силы, а затем начинает идти по прямой линии вправо (заданное желаемое положение является прямой линией). Заданное желаемое положение и требуемая сила показаны на рисунке 12. Благодаря интегральному адаптивному управлению проводимостью в реальном времени реализуется коррекция желаемого положения конца манипулятора, так что он находится в контакте с поверхностью, и постоянная сила реализуется контроль.
Параметры интегрального адаптивного управления проводимостью установлены на , , и , а фактический эффект отслеживания показан на рисунке 13. Из-за высокочастотной силы в процессе сбора данных для получения исходного сигнала в этой статье используется фильтр с конечной импульсной характеристикой FIR для фильтрации данных. Ожидается, что на неизвестной поверхностной стадии ошибка будет в пределах ±0,8 N, а эффект отслеживания будет хорошим.
6. Обсуждение
В этой статье разрабатывается легкий космический манипулятор, который имеет компактную конструкцию и высокое отношение нагрузки к весу. Кроме того, предлагается метод интегрального адаптивного контроля податливости, а адаптивная система допусков выражается в виде линейной системы третьего порядка. Он устраняет недостатки традиционного управления проводимостью с установившимися ошибками и адаптивными изменениями окружающей среды, а также преодолевает нелинейные проблемы, вызванные традиционным дискретным компенсационным членом адаптивной проводимости. Интегральное адаптивное управление проводимостью может быть преобразовано в частотную область по Лапласу для анализа характеристик управления и может быть преобразовано в -функцию по гиперболе для получения дифференциального выражения и повышения точности вычислений. Наконец, эксперимент по интегральному адаптивному управлению проводимостью был завершен, и был получен хороший эффект отслеживания силы. Основываясь на текущих результатах исследований, в будущем мы будем проводить исследования по восприятию силы робота и методам контроля соответствия в сотрудничестве человека и робота, а также алгоритмам координации и контроля двух рук (или нескольких рук).
Кроме того, предлагается метод интегрального адаптивного контроля податливости, а адаптивная система допусков выражается в виде линейной системы третьего порядка. Он устраняет недостатки традиционного управления проводимостью с установившимися ошибками и адаптивными изменениями окружающей среды, а также преодолевает нелинейные проблемы, вызванные традиционным дискретным компенсационным членом адаптивной проводимости. Интегральное адаптивное управление проводимостью может быть преобразовано в частотную область по Лапласу для анализа характеристик управления и может быть преобразовано в -функцию по гиперболе для получения дифференциального выражения и повышения точности вычислений. Наконец, эксперимент по интегральному адаптивному управлению проводимостью был завершен, и был получен хороший эффект отслеживания силы. Основываясь на текущих результатах исследований, в будущем мы будем проводить исследования по восприятию силы робота и методам контроля соответствия в сотрудничестве человека и робота, а также алгоритмам координации и контроля двух рук (или нескольких рук).